

Voltage Transformers
A Transformer does not generate electrical power, it transfers electrical power. A transformer is a voltage changer. Most transformers are designed to either step voltage up or to step it down, although some are used only to isolate one voltage from another. The transformer works on the principle that energy can be efficiently transferred by magnetic induction from one winding to another winding by a varying magnetic field produced by alternating current . An electrical voltage is induced when there is a relative motion between a wire and a magnetic field. Alternating current (AC) provides the motion required by changing direction which creates a collapsing and expanding magnetic field.
NOTE: Direct current (DC) is not transformed, as DC does not vary its magnetic fields
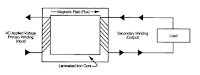
A transformer usually consists of two insulated windings on a common iron (steel) core.
The two windings are linked together with a magnetic circuit which must be common to both windings. The link connecting the two windings in the magnetic circuit is the iron core on which both windings are wound. Iron is an extremely good conductor for magnetic fields. The core is not a solid bar of steel, but is constructed of many layers of thin steel called laminations. One of the windings is designated as the primary and the other winding as the secondary. Since the primary and secondary are wound the on the same iron core, when the primary winding is energized by an AC source, an alternating magnetic field called flux is established in the transformer core. The flux created by the applied voltage on the primary winding induces a voltage on the secondary winding. The primary winding receives the energy and is called the input. The secondary winding is discharges the energy and is called the output.
The primary and secondary windings consist of aluminum or copper conductors wound in coils around an iron core and the number of turns in each coil will determine the voltage transformation of the transformer. Each turn of wire in the primary winding has an equal share of the primary voltage . The same is induced in each turn of the secondary. Therefore, any difference in the number of turns in the secondary as compared to the primary will produce a voltage change.
Windings
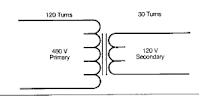
Step Down Transformers
If there are fewer turns in the secondary winding than in
the primary winding, the secondary voltage will be lower than the primary.
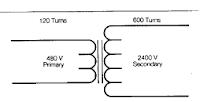
Step Up Transformers
If there are fewer turns in the primary winding than in the secondary winding, the secondary voltage will be higher than the secondary circuit.
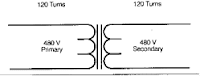
Note: The primary winding is the winding which receives the energy; it is not always the high-voltage winding. When the primary winding and the secondary winding have
the same amount of turns there is no change voltage, the ratio is 1/1 unity.
Common single-Phase Voltage Combinations:
120 x 240 to 120/240; 480 to 120/240; 4160 to 240/480
208 to 120/240; 480 to 120/240; 4160 to 240/480
277 to 120/240; 2400 to 120/240
240 x 480 to 120/240; 2400 to 240/480
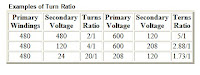
This relationship between the number of turns in the secondary and primary is often called the turns ratio (also referred to as the voltage ratio). It is customary to specify the turns ratio by writing the primary (input) number first.
Example: 30 to 1 is a step-down transformer, whereas a 1 to 30 would be a step-up transformer.
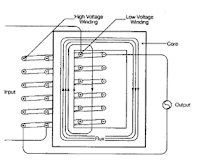
Winding Physical Location: In most transformers the high voltage winding is wound directly over the low voltage winding to create efficient coupling of the two windings.
Note: Other Designs may have the high voltage winding wound inside, side-by-side or sandwiched between layers of the low voltage winding to meet special requirements.
As stated previously, the voltage transformation is a function of the turns ratio. It may be desirable to change the ratio in order to get rated output voltage when the incoming voltage is slightly different than the normal voltage. As an example, suppose we have a transformer with a 4 to 1 turns ratio. With 480 volts input, the output would be 120 volts. Suppose the line voltage is less than the normal or 456 volts. This would produce an output voltage of 114 volts which is not desirable. By placing a tap in the primary winding, we could change the turns ratio so that with 456 volts input we could still get 120 volts output. This is called primary output voltage tap and standard transformers may have from two to six taps for the purpose of the adjusting to actual line voltages.
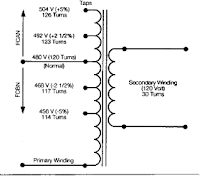
The above transformer has a tap (2) 2 1/2% below normal and one at 5% below , it is said to have (2) 2 1/2% full capacity below normal taps (FCBN). This would give a 5% voltage range. When the transformer has taps above normal as shown, they would be full capacity above normal (FCAN).
For Standardization purposes, these taps are in 2 1/2% or 5% steps. The taps are so designed that full capacity output can be obtained when the transformer is set on any of these taps. The universal tap arrangement used on many of our transformers ((2) 2 1/2% FCAN and (4) 2 1/2% FCBN) provides a 15% range of tap voltage adjustments.
Note: taps are only to be used for steady state input line variations. They are not designed to provide a constant secondary voltage when the input line is constantly fluctuating.
Series-Multiple Windings (Reconnectable Transformers)
To make the basic single-phase transformer move versatile, both the primary and secondary windings can be made in two equal parts. The two parts can be reconnected either in a series or in parallel . This provides added versatility as the primary winding can be connected for either 480 volts or 240 volts and the secondary winding can likewise be divided into two equal parts providing either 120 or 240 volts. (note: there will be four leads per winding brought out to the terminal compartment rather than two). Either arrangement will not affect the capacity of the transformer. Secondary windings are rated with a slant such as 120/240 and can be connected in a series for 240V or in a parallel for 120V or 240/120V (for 3-wire operation). Primary windings rated with an X such as 240X480 can operate in series or parallel but are not designed for 3-wire operation. A transformer rated 240X480V primary, 120/240V secondary could be operated in 6 different voltage combinations. Transformers are designed and cataloged by KVA ratings. Just as horsepower ratings designate the power capacity of an electric motor, a transformer’s KVA rating indicates its maximum power output capacity. The higher the transformers KVA rating for a specific input and output voltage, the larger transformer.
What does KVA mean? K= Abbreviation of the Greek word kilo, meaning ‘times 1000 V= Volts A= Amperes or Amp
Calculating KVA. There are only two formulas which you will need to know in order to calculate KVA:
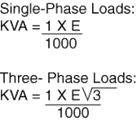
Where:
I = Amps
E = Volts
V3 = 1.732
For Example: A Transformer is supplying a three-phase load that draws 100 amps and requires a supply voltage of 208 volts. Therefore:
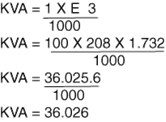
Thus, you must select a transformer with a capacity greater than 36.026 KVA.
Alternate Choice Use the FPT full load current rating chart and the secondary voltage on page 3 of the FPT catalog to establish the correct KVA.
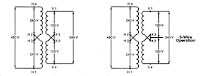
Connection: Primary in Series, Secondary in series.
Connection: Primary in Series, Secondary in series.

Connection: Primary in series, Secondary in Parallel.
Connection: Primary in Parallel, Secondary in series

Connection: Primary in Parallel, Secondary in series.
Connection: Primary in Parallel, Secondary in Parallel.
A Transformer does not generate electrical power, it transfers electrical power. A transformer is a voltage changer. Most transformers are designed to either step voltage up or to step it down, although some are used only to isolate one voltage from another. The transformer works on the principle that energy can be efficiently transferred by magnetic induction from one winding to another winding by a varying magnetic field produced by alternating current . An electrical voltage is induced when there is a relative motion between a wire and a magnetic field. Alternating current (AC) provides the motion required by changing direction which creates a collapsing and expanding magnetic field.
NOTE: Direct current (DC) is not transformed, as DC does not vary its magnetic fields
A transformer usually consists of two insulated windings on a common iron (steel) core.
The two windings are linked together with a magnetic circuit which must be common to both windings. The link connecting the two windings in the magnetic circuit is the iron core on which both windings are wound. Iron is an extremely good conductor for magnetic fields. The core is not a solid bar of steel, but is constructed of many layers of thin steel called laminations. One of the windings is designated as the primary and the other winding as the secondary. Since the primary and secondary are wound the on the same iron core, when the primary winding is energized by an AC source, an alternating magnetic field called flux is established in the transformer core. The flux created by the applied voltage on the primary winding induces a voltage on the secondary winding. The primary winding receives the energy and is called the input. The secondary winding is discharges the energy and is called the output.
The primary and secondary windings consist of aluminum or copper conductors wound in coils around an iron core and the number of turns in each coil will determine the voltage transformation of the transformer. Each turn of wire in the primary winding has an equal share of the primary voltage . The same is induced in each turn of the secondary. Therefore, any difference in the number of turns in the secondary as compared to the primary will produce a voltage change.
Windings
Step Down Transformers
If there are fewer turns in the secondary winding than in
the primary winding, the secondary voltage will be lower than the primary.
Step Up Transformers
If there are fewer turns in the primary winding than in the secondary winding, the secondary voltage will be higher than the secondary circuit.
Note: The primary winding is the winding which receives the energy; it is not always the high-voltage winding. When the primary winding and the secondary winding have
the same amount of turns there is no change voltage, the ratio is 1/1 unity.
Common single-Phase Voltage Combinations:
120 x 240 to 120/240; 480 to 120/240; 4160 to 240/480
208 to 120/240; 480 to 120/240; 4160 to 240/480
277 to 120/240; 2400 to 120/240
240 x 480 to 120/240; 2400 to 240/480
This relationship between the number of turns in the secondary and primary is often called the turns ratio (also referred to as the voltage ratio). It is customary to specify the turns ratio by writing the primary (input) number first.
Example: 30 to 1 is a step-down transformer, whereas a 1 to 30 would be a step-up transformer.

Winding Physical Location: In most transformers the high voltage winding is wound directly over the low voltage winding to create efficient coupling of the two windings.
Note: Other Designs may have the high voltage winding wound inside, side-by-side or sandwiched between layers of the low voltage winding to meet special requirements.
As stated previously, the voltage transformation is a function of the turns ratio. It may be desirable to change the ratio in order to get rated output voltage when the incoming voltage is slightly different than the normal voltage. As an example, suppose we have a transformer with a 4 to 1 turns ratio. With 480 volts input, the output would be 120 volts. Suppose the line voltage is less than the normal or 456 volts. This would produce an output voltage of 114 volts which is not desirable. By placing a tap in the primary winding, we could change the turns ratio so that with 456 volts input we could still get 120 volts output. This is called primary output voltage tap and standard transformers may have from two to six taps for the purpose of the adjusting to actual line voltages.
The above transformer has a tap (2) 2 1/2% below normal and one at 5% below , it is said to have (2) 2 1/2% full capacity below normal taps (FCBN). This would give a 5% voltage range. When the transformer has taps above normal as shown, they would be full capacity above normal (FCAN).
For Standardization purposes, these taps are in 2 1/2% or 5% steps. The taps are so designed that full capacity output can be obtained when the transformer is set on any of these taps. The universal tap arrangement used on many of our transformers ((2) 2 1/2% FCAN and (4) 2 1/2% FCBN) provides a 15% range of tap voltage adjustments.
Note: taps are only to be used for steady state input line variations. They are not designed to provide a constant secondary voltage when the input line is constantly fluctuating.
Series-Multiple Windings (Reconnectable Transformers)
To make the basic single-phase transformer move versatile, both the primary and secondary windings can be made in two equal parts. The two parts can be reconnected either in a series or in parallel . This provides added versatility as the primary winding can be connected for either 480 volts or 240 volts and the secondary winding can likewise be divided into two equal parts providing either 120 or 240 volts. (note: there will be four leads per winding brought out to the terminal compartment rather than two). Either arrangement will not affect the capacity of the transformer. Secondary windings are rated with a slant such as 120/240 and can be connected in a series for 240V or in a parallel for 120V or 240/120V (for 3-wire operation). Primary windings rated with an X such as 240X480 can operate in series or parallel but are not designed for 3-wire operation. A transformer rated 240X480V primary, 120/240V secondary could be operated in 6 different voltage combinations. Transformers are designed and cataloged by KVA ratings. Just as horsepower ratings designate the power capacity of an electric motor, a transformer’s KVA rating indicates its maximum power output capacity. The higher the transformers KVA rating for a specific input and output voltage, the larger transformer.
What does KVA mean? K= Abbreviation of the Greek word kilo, meaning ‘times 1000 V= Volts A= Amperes or Amp
Calculating KVA. There are only two formulas which you will need to know in order to calculate KVA:

Where:
I = Amps
E = Volts
V3 = 1.732
For Example: A Transformer is supplying a three-phase load that draws 100 amps and requires a supply voltage of 208 volts. Therefore:

Thus, you must select a transformer with a capacity greater than 36.026 KVA.
Alternate Choice Use the FPT full load current rating chart and the secondary voltage on page 3 of the FPT catalog to establish the correct KVA.

Connection: Primary in Series, Secondary in series.
Connection: Primary in Series, Secondary in series.

Connection: Primary in series, Secondary in Parallel.
Connection: Primary in Parallel, Secondary in series
Connection: Primary in Parallel, Secondary in series.
Connection: Primary in Parallel, Secondary in Parallel.





















.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)


